So macht das echt keinen Spass. Die System-Load auf meinem Server bewegt sich zeitweise jenseits der 50, Apache und MySQL gehen dementsprechend auf dem Zahnfleisch, manche Skripte laufen Amok weil sie in Timeouts laufen. Die Prozesstabelle zeigt fast nur noch httpd, ein Blick in dessen Logfiles offenbart ungewoehnlich viele Eintraege nach einem bestimmten Muster:
# egrep "wp-comments-post.php.*Maxthon" /var/log/apache/access.log | wc -l
23930
Natuerlich freue ich mich ueber Kommentare im Blog, aber das erklaert warum das Spam-Plugin in den letzten Tagen teilweise ueber 5000 Beitraege pro Tag weggefiltert hat. 
Mal sehen, wie viele Besucher Zombies das denn so sind:
# egrep "wp-comments-post.php.*Maxthon" /var/log/apache/access.log | cut -d " " -f 1 | sort -un | wc -l
393
OK, das schreit nach Gegenmassnahmen:
egrep "wp-comments-post.php.*Maxthon" /var/log/apache/access.log | \
cut -d " " -f 1 | sort -un | while read ip; do iptables -A INPUT -i eth0 -s $ip -j DROP; done
Mal sehen wie lange das jetzt vorhaelt. Spaetestens ein Reboot macht diese Erste-Hilfe-Massnahme wieder zunichte, aber die feine englische Art ist das ja eh nicht. Hat vielleicht jemand eine bessere Idee?

 Mit dem Platz auf dem Bildschirm ist es wie mit dem Hubraum im Auto: Das einzige was besser ist als eine hohe Auflösung ist eine noch höhere Auflösung. Klar, daß ich da auf meinem kleinen Notebook (IBM X22) mit seinen 1024×768 Pixeln haushalten muß.
Mit dem Platz auf dem Bildschirm ist es wie mit dem Hubraum im Auto: Das einzige was besser ist als eine hohe Auflösung ist eine noch höhere Auflösung. Klar, daß ich da auf meinem kleinen Notebook (IBM X22) mit seinen 1024×768 Pixeln haushalten muß. Jetzt sieht es aber etwas merkwürdig aus, daß zwischen den Icons ein textueller Menüpunkt steht.
Jetzt sieht es aber etwas merkwürdig aus, daß zwischen den Icons ein textueller Menüpunkt steht. 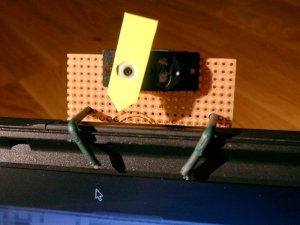 Mein letztes Mikrocontroller-Projekt ist gerade online gegangen: Das
Mein letztes Mikrocontroller-Projekt ist gerade online gegangen: Das 